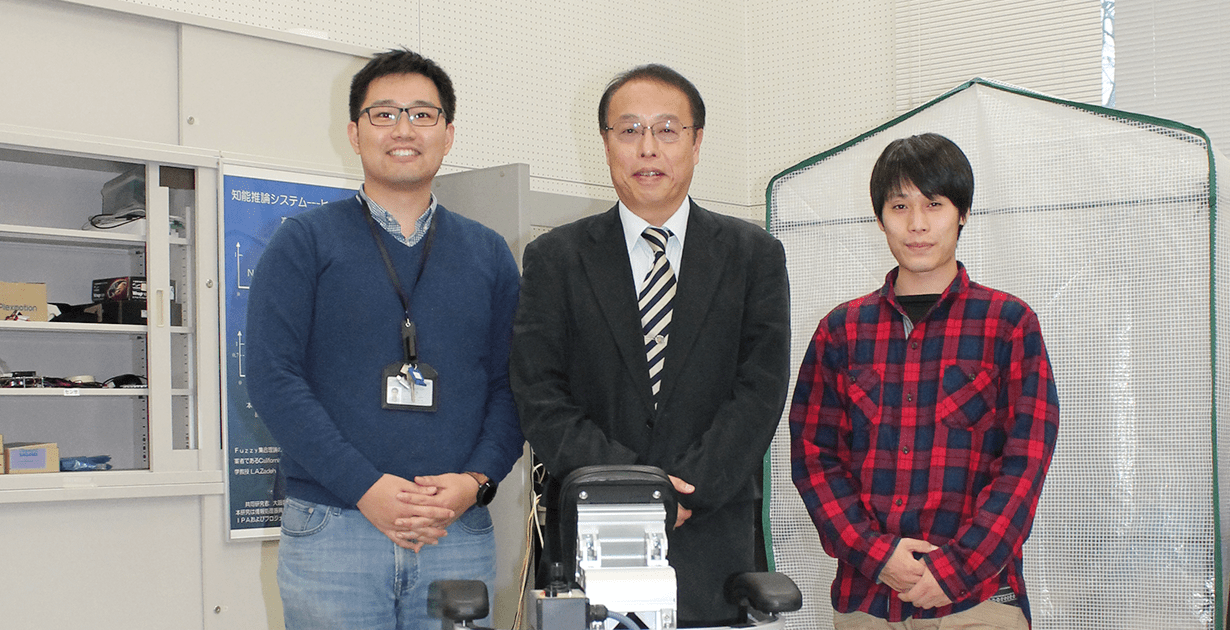
日本初の単体多機能型生活支援ロボットの開発「産業基盤の創生」第4回助成 助成期間:2013年4月~2015年3月
採択テーマ:自立高齢者生活支援のためのインテリジェント・ロボットの開発
助成期間中の研究内容について
下肢障害者や弱体高齢者の自立生活を支援する、日本初の単体多機能型生活支援ロボットの開発
私が初めて本格的に福祉ロボットを開発したのは、健康推進ロボットでした。産業ロボットを研究していたのですが、日本機械学会の学会誌における健康推進ロボットの話からヒントを得て、マッサージロボットをやりました。高知工科大学に赴任した翌年、当時厚労省の研究班(故人木村哲彦先生は班長で、乗馬ロボットの提案者)に参加する機会に恵まれ、当時、松下電工の研究者達と高知医科大学の石田健司先生と一緒に、馬の動きと乗馬者の筋肉との関連性を解明しました。この研究成果に基づいて、松下電工は「JOBA」というフィットネス機器の開発に成功しました。これは、日本発オリジナルなヒット商品となり、世界中で数十万台もの売り上げがありました。
次に手掛けたのは歩行訓練ロボット。歩行訓練には、一般的に簡易型ウォーカーや平行棒などが使われますが、訓練中に訓練者が倒れてしまったり、事故を起こしてしまったりするケースもあります。それを防ぐためにロボットで何とか出来ないかという要望があり、360°動き回る車輪を開発。高知大学医学部と高知県内企業と共同で、倒れない歩行訓練ロボット「歩行王」を開発し商品化されました。今は海外にも輸出されています。
健康推進ロボット技術を更に発展させたのが、助成期間中に開発した単体多機能型の生活支援ロボットです。これは、椅子に座ったまま様々な作業ができたらいいな、椅子を賢いロボットにしよう、という発想のもと、下肢障害者や弱体高齢者の自立生活を支援するロボットです。大きな成果として挙げられるのは、本質的安全性の保証をしたことです。介護ロボットは産業ロボットとは違い、生身の人が相手ですので、何よりも安全性の確保が最も大事です。私たちは、本質的安全なメカニズムと、安全性制御法の開発に成功しました。これらの成果は、電気回路の故障や制御アリゴリズムへのノイズなど外乱があっても、使用者の安全性を確保できます。
そのほかに単体多機能型生活支援ロボットの特徴は?
現在福祉機器はたくさんありますが、単一機能しか持っていないのはほとんどです。高齢になると身体機能は確実に弱くなってくるので、掃除ロボットや移乗ロボットなど、それぞれの機能を持つロボットが複数台必要になってしまいます。しかしそれでは部屋中がロボットだらけになってしまい、置き場所の問題や多様な操作要の問題やコストの問題があるため現実的ではありません。ひとつのロボットで複数の機能を持ち、そして高齢者にとっては、操作のし易さも重視して完成させました。

上半身の動きからその人の作業意図を理解し動作につなげることができ、煩雑な操作なく、作業に合わせて移動することを可能にしました。生活支援ロボットはその人の足代わりとなるので、例えば、乗って掃除機をかけた場合、腕の曲がり具合によって、掃除したい方向などの意図をロボットが認識し、今まで使い慣れてきた掃除機やほうきがそのまま使えるようにしました。掃除するための専用の掃除ロボットを用意しようという考え方ではなく、このロボットを使うことで、なるべくその人自身が今まで通りの生活をしてほしいという願いを込めています。
本質的な安全性の確保や作業意図の推定ができる生活支援ロボットは、世界で初めてではないかと考えます。
ロボット実証実験は、本当の実環境で実験しようという思いから、普通の家を年中借りて行っています。台所やベッドやトイレの高さなど、大学の実験室だけでは確かめられない部分もあるので、家具も全てそろった普通の生活環境の中での実証実験で、より現実に近い環境で実験出来ていると自信を持っています。
研究助成後に進歩・発展したことはありますか?
寝たきりの障害者のお世話ロボットの開発
現在進行形ですが、開発した技術を生かして、言語力もない、文字もかけない、あるいはジェスチャーもできないという、寝たきりの方の世話するロボットを開発中です。寝たきりということですから、脳活動情報を利用して、ロボットがその人の意図を推測することができるようになることをめざしています。お腹がすく状態や喉が渇く状態で、脳内のヘモグロビンの酸素濃度を測るという実験は、学生諸君にも協力してもらっています。実はこのロボットにも、キヤノン財団の助成中に進化させたオムニホイールが使われています。この車輪のおかげで、前後左右、狭いところも移動できます。2年後にはこのロボットを完成させて披露したいと考えています。
また、今年8月には、中国で行われた知能と安全性に関する国際学会(IEEE International Conference on Intelligence and Safety for Robotics)で、Best Student Paper Awardを受賞しました。助成期間中に開発した生活支援ロボットが更に進化し、世界初独自の我々の安全性制御の概念が評価され受賞することが出来て、嬉しかったです。
では、研究者になろうと思ったきっかけは?
両親の影響もありました。二人とも医者なのですが、救急があればすぐに電話で呼び出しがあって、正月は家族そろっての食事はほとんどできませんでした。子どもの頃は両親の職業が嫌いで、工学などものを作ったりするのが好きだったのもあり、受験では医学部ではなく、工学部を選びました。しかし、今私がやっている医療福祉介護ロボットは、どちらかと言うと医学に近い分野です。結果的に「人を助ける」ための研究をしていますし、特に、患者のために尽くしていた父親の影響は大きいと思います。
約30年前日本に留学した時は、産業ロボットをやっていましたが、その後、山形大学に赴任した時に、最初に話した日本機械学会の学会誌を目にしたのです。その学会誌には、高齢介護福祉について書いてあり、高齢者の本質的な定義は、年齢ではなく健康である、という部分に感銘を受けました。一通り勉強してきたロボット技術を使って、健康増進に役立つロボットを開発したら、高齢化社会に貢献できるんじゃないかとひらめき、1997年に高知工科大学に来てから、本格的に取り組み始め、「JOBA」の開発へとつながっていきました。
最後に、今後の夢は?
ロボット分野は、今後ますます盛り上がっていくと期待しています。医療福祉介護ロボットが出来るたびに、現場で実証実験及び臨床試験をするのですが、日本の高齢者はとても協力的で理解があり、ありがたいと感謝しています。講演でロボットの動画を見せた時のみなさんの驚く表情も印象的ですし、この研究はとても楽しいです。
高いコストパフォーマンス、簡単な操作性、そして安全性の保証。以前から、介護ロボットにはそれら3つの要素が必要であると考えていましが、これまでは、それら全てを満たすものはありませんでした。どちらかというと地味であまり目立たない研究ではありますが、絶対にあきらめずに、日本発の福祉介護ロボットの開発を続け、「JOBA」のように、世界中のいろんな国に普及させたいです。